TacLINK: una pelle artificiale a misura dei robot collaborativi

Uno dei maggiori problemi dei cobot, sempre più ampiamente utilizzati nell’era della cosiddetta “Industria 4.0”, risiede nella sicurezza. I cobot, infatti, collaborano con l’uomo e operano negli stessi ambienti in cui anche gli esseri umani lavorano. Nasce, pertanto, l’esigenza di garantire un certo livello di affidabilità agli operatori che si trovano a dover svolgere delle attività in collaborazione con essi. La quasi totalità dei sistemi di protezione dagli incontri accidentali che possono insorgere tra gli esseri umani e i robot è basata, attualmente, sull’utilizzo di sensori di svariate tipologie.
Essi rendono la macchina “dotata” di una discreta capacità di percezione in grado di poter evitare contatti pericolosi con le persone che la circondano. Ormai i robot più all’avanguardia, impiegati specialmente in ambito industriale, sono capaci di percepire molti dei nostri canonici cinque sensi. Ce ne sono due però, sui quali sono orientate le sfide della ricerca del prossimo futuro: il gusto e il tatto. Ora, le cose sembrano essere cambiate con TacLink, il primo prototipo di pelle artificiale per i robot.
L’idea di una pelle artificiale
È proprio in questa direzione che nei laboratori della Japan Advanced Institute of Science and Technology il prof. Van Anh Ho e i suoi collaboratori hanno realizzato una pelle artificiale per robot. Il prototipo, dal nome TacLINK, è costruito su una struttura tubolare rivestita da una membrana in silicone dotata di una vasta gamma di sensori in grado di fornire al robot che lo indossa non solo un feedback tattile, ma anche la capacità di captare le micro-deformazioni a cui è soggetta la membrana quando questa entra in contatto con un corpo esterno.

Come è fatta la TacLINK, la pelle artificiale per i robot
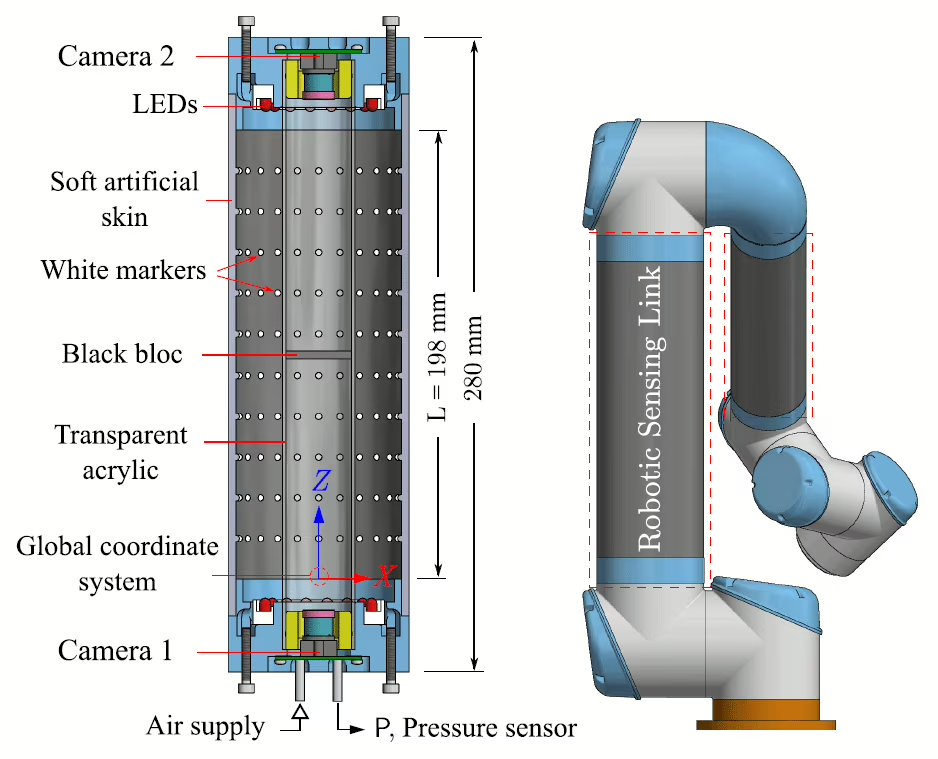
Il sistema aptico artificiale messo a punto dai ricercatori comprende due camere da 640×480 px, da 30 fps ciascuna, e una serie di LED ad alta intensità luminosa. I LED utilizzano anche un filtro polarizzante per generare una luce uniforme minimizzando quella riflessa. Al centro della struttura a forma di tubo è presente anche uno strato di materiale nero in modo da bloccare la luce prodotta dai LED che, altrimenti, andrebbe ad impattare i sensori delle camere. La pelle artificiale, spessa soltanto 3,5 millimetri, presenta un’area sensibile complessivamente di circa 500 centimetri quadrati costituita da una maglia di piccoli fori, chiamati “marcatori”, in grado di ricevere i feedback tattili.
L’image processing alla base del feedback tattile
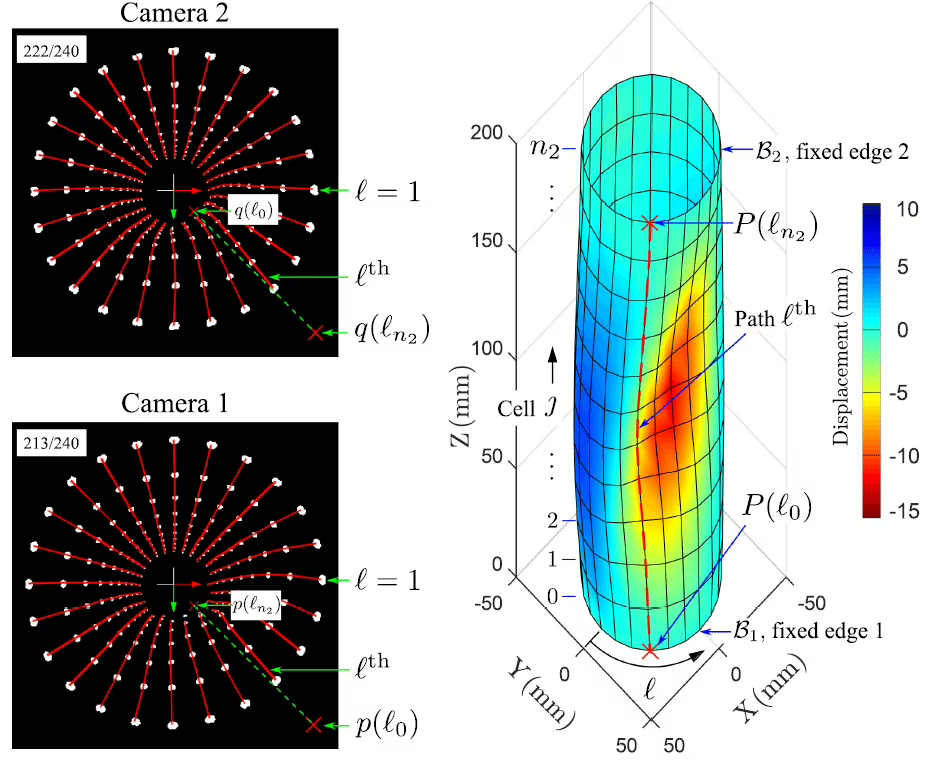
Il principio di funzionamento del feedback tattile della TacLINK si basa sull’utilizzo delle due camere coassiali poste alle due estremità della struttura tubolare. Esse, insieme, formano una stereo camera grazie alla quale è possibile conoscere istante per istante le posizioni di tutti i marcatori posti sulla membrana di silicone. Un algoritmo di image processing ricostruisce il modello 3D della membrana a partire dagli spostamenti dei marcatori rilevati. Così facendo esso è in grado di modellare le deformazioni subite dalla pelle, semplicemente analizzando la distribuzione delle forze che esercitano su di essa. Questo è possibile grazie anche al Modello ad Elementi Finiti (FEM) della membrana costruito precedentemente e utilizzato per stimare la rigidità strutturale della pelle.
Combinando i dati provenienti dalle camere e dai risultati ottenuti dall’analisi FEM, il processore ricostruisce con elevata precisione ed estrema velocità la geometria del contatto. Dai test condotti sulla pelle artificiale è emerso che il sistema di feeedback tattile impiega circa 35 millisecondi per ricostruire completamente la risposta aptica. Sebbene la presenza di riflessi o di regioni occluse possa impedire la corretta elaborazione delle immagini e il sistema sviluppato richieda un’elevata capacità di calcolo real-time, il prof. Ho si è mostrato abbastanza fiducioso circa una rapida commercializzazione del prototipo realizzato:
“La pelle artificiale utilizzata nel nostro studio può essere facilmente fabbricata con il metodo della colata e utilizzata anche su altre parti dei robot, come dita, gambe, torace e testa e addirittura per realizzare delle protesi smart per gli esseri umani, permettendo ad una persona disabile di poter avere le stesse percezioni di una persona sana.”
Prof. Van Anh Ho
Soluzioni di questo tipo aprono la strada a nuove frontiere nello sviluppo di sistemi robotici indossabili. Essi saranno capaci di ricevere feedback tattili che possono rivelarsi utili non solo nell’industria, ma anche nella medicina, realizzando protesi in grado di percepire correttamente gli stimoli esterni.
Articolo a cura di Augusto Bozza