Supercar: K.I.T.T. potrebbe diventare realtà grazie al progetto italiano “1000 Miglia Autonomous Drive”

Catapultata dal XX secolo, la Supercar non rappresenta più quel fantastico automa ancorato a largo dell’immaginifico mare di una serie TV, ma è una concreta realtà. La carenatura: non più quella della Pontiac Firebird Trans Am del 1982 ma quella della splendida Maserati MC20 Cielo. Ma procediamo con ordine. Per chi non lo sapesse: la serie televisiva il cui titolo originale è “Knight Rider” tradotto in italiano con “Supercar” è stato un telefilm realizzato in negli Stati Uniti tra il 1982 e il 1986, programmato anche in Italia. La fondazione Knight, con a capo Wilton Knight, recluta Michael Long. Al quale, dopo aver salvato la vita, viene creta una nuova identità e trasformato nel pilota di K.I.T.T acronimo che sta per “Knight Industries Two Thousands”, una super-macchina automa dotata di un’avveniristica intelligenza artificiale.
Supercar e Automi

Qual è l’anello di congiunzione tra un’auto, Supercar, nata dalla fantasia di Glen A. Larson autore televisivo statunitense di successo e una fuoriserie Maserati? In Informatica, per lo studio di teorie come quelle della Complessità e della Calcolabilità, ci si serve di modelli computazionali astratti e semplificati, considerata la difficoltà dei personal computer ad essere usati come macchine ideali. Tra i più semplici insiemi astratti troviamo gli automi. Questi strutture semplificate sono state inizialmente create per simulare il funzionamento del cervello umano, e vengono usate con successo in molti contesti reali.
Automi a stato finito
Gli automi a stato finito hanno un vasto campo di applicazioni e sono immaginabili come sistemi in grado di svolgere delle attività in maniera autonoma, senza l’intervento dell’uomo. Vengono usati per la progettazione e la creazione di tutta una serie di strutture che s’incontrano spesso nella vita quotidiana, impianti come: Semafori, distributori di merendine, di bevande, lavatrici, lavastoviglie, distributori di benzina, sono tutti esempi di come funziona un automa a stato finito. In tutte queste strutture sono definite delle regole. Tali regole, insieme agli input, ovvero: stimoli ricevuti in ingresso dal mondo esterno, consentono all’automa di decidere come e quando cambiare il suo stato interno e in virtù di questo determinare quale debba essere l’uscita da assumere. Il suo (output).
Nel nostro caso, con automa, indicheremo un’auto capace di compiere delle operazioni in autonomia, senza l’intervento di una persona. Quindi KITT, l’auto protagonista della serie televisiva degli anni 80 è un automa. Completamente automatizzata, guidata da un’intelligenza artificiale, capace di parlare, guidare da sola.
Il Progetto 1000 Miglia Autonomous Drive
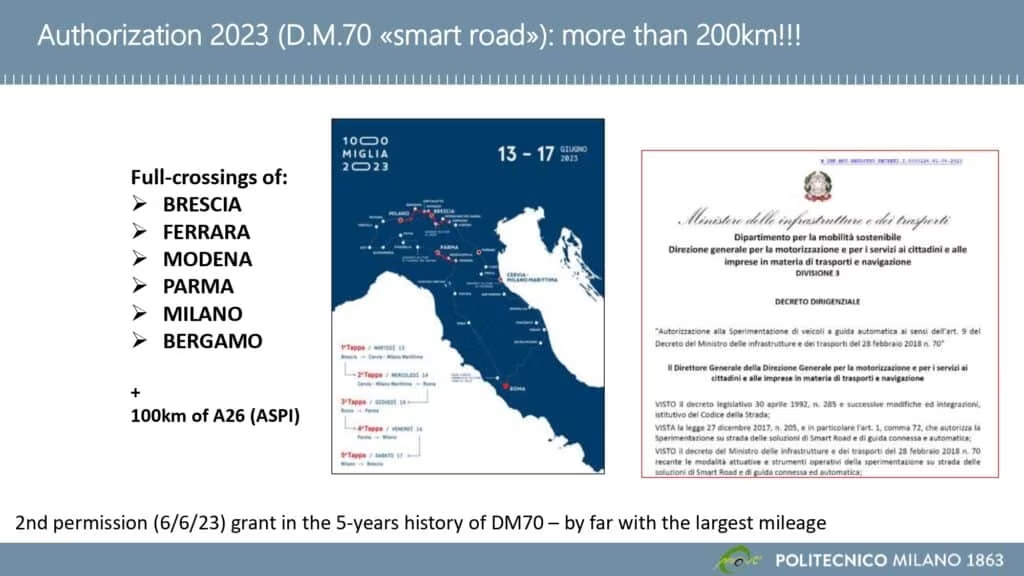
Così come la Maserati MC20 Cielo, forse non ancora capace di dialogare, ma grazie al gruppo di giovani ingegneri del Politecnico di Milano con a capo il professore Savaresi è stata resa parte integrante del progetto 1000 Miglia Autonomous Drive dotandola di un sistema di guida autonomo. Questo grazie anche all’autorizzazione ricevuta dal Ministero delle infrastrutture e dei trasporti.
Il Team Leader

Il Prof. Sergio Matteo Savaresi, classe 1968. Consegue il dottorato in System and Control Engineering e un master in Ingegneria Elettrica al Politecnico di Milano, più un master in Matematica Applicata all’UCSC. Dal 2006 è professore a tempo pieno di Automatic Control al Politecnico di Milano. Mentre dal 2023 è a capo del DEIB (Dipartimento di Elettronica, Informatica e Bioingegneria) al Politecnico di Milano, ed è responsabile scientifico del progetto 1000 MAD (1000 Miglia Autonomous Drive).
1000 Miglia Autonomous Drive: realizzazione del progetto
L’ampio progetto ha come obiettivo la guida completamente autonoma del veicolo, indipendente dal fattore umano. Iniziato con una fase di sperimentazione. In questa prima fase si è proceduto perimetrando la complessità della sfida, studiandone ogni aspetto e difficoltà. Successivamente, equipaggiando la sportiva della Maserati, con appositi strumenti, tra i quali: vari tipi di sensori, attuatori e unità di calcolo.
Software

Si è poi passato allo sviluppo del complesso software. Chiamato a gestire ed elaborare la grande quantità di dati ricevuti dalla sensoristica. Ma quello che più ha messo alla prova il team d’ingegneri di Savaresi è stato lo studio della compatibilità del complesso sistema hardware montato sull’auto con il sistema di guida autonomo implementato.
Quindi è stato obbligatorio procedere con l’avvicendamento di test fatti in pista o in strada. Questo allo scopo di convalidare i progressi ottenuti, e la graduale aggiunta di nuovi elementi cercando così di ottimizzare le varie fasi di sviluppo.
1000 Miglia Autonomous Drive: le prime prove generali

Una delle prove generali del progetto, a conferma dei risultati ottenuti, è stata la partecipazione alla 1000 Miglia di Giugno 2023. Test svolto in parte con la guida autonoma. Questo ha fatto da apripista allo step successivo, ovvero, ampliare le abilità di guida autonoma del veicolo. In un secondo tempo sono stati testati numerosi altri parametri gestiti dal controllore, questo è stato necessario per ottimizzare ulteriormente l’esperienza di guida.
Lo scopo da raggiungere con queste prove e successive ottimizzazioni consiste nel riuscire a fare, nella più ottimistica delle previsioni, l’intero percorso della 1000 Miglia 2024 in modalità guida autonoma. Ma più realisticamente, almeno gran parte dell’intero percorso.
Comunicazione in tempo reale
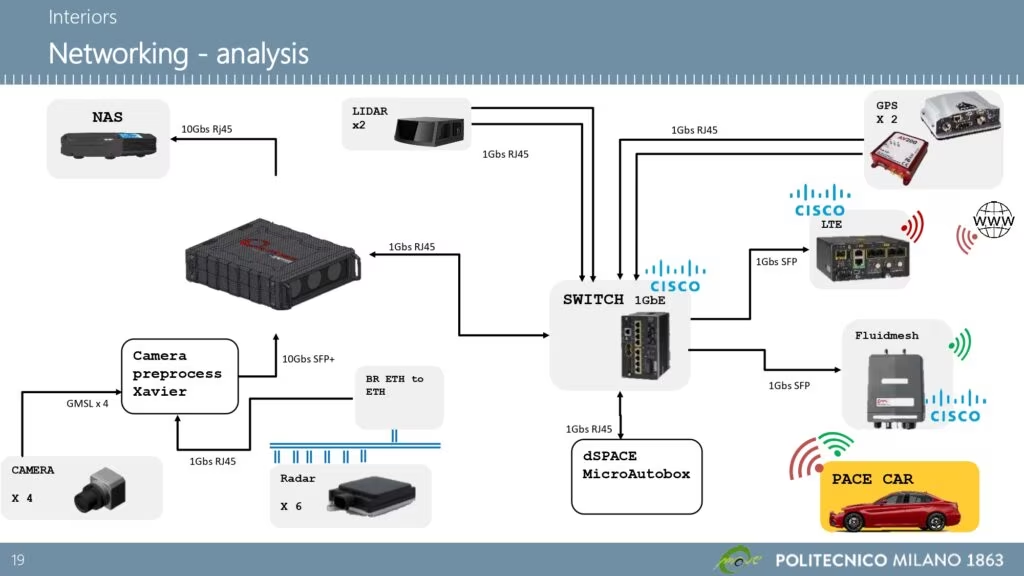
Altro campo di battaglia sul quale la squadra del politecnico si è dovuta battere, è rappresentato dalla comunicazione in tempo reale dei dati provenienti dal veicolo. Rendere stabile la connessione e poter ricevere le informazioni provenienti da tutta la sensoristica. Questo grazie anche a CISCO che è stato partner fondamentale e un importantissimo contributore di tecnologia.
Una ulteriore problematica da affrontata potrebbe essere stata quella dell’enorme mole di dati inviati al controllore dalla varia sensoristica e architettura network montata a bordo del veicolo. Con una tale quantità di dati, e con una connessione non ottimizzata, si sarebbe potuto creare quel tanto temuto collo di bottiglia. Tale fenomeno avrebbe impedito al sistema del veicolo di percepire l’ambiente circostante, ritardando l’individuazione degli ostacoli e la rilevazione della segnaletica stradale orizzontale.
Test su strada
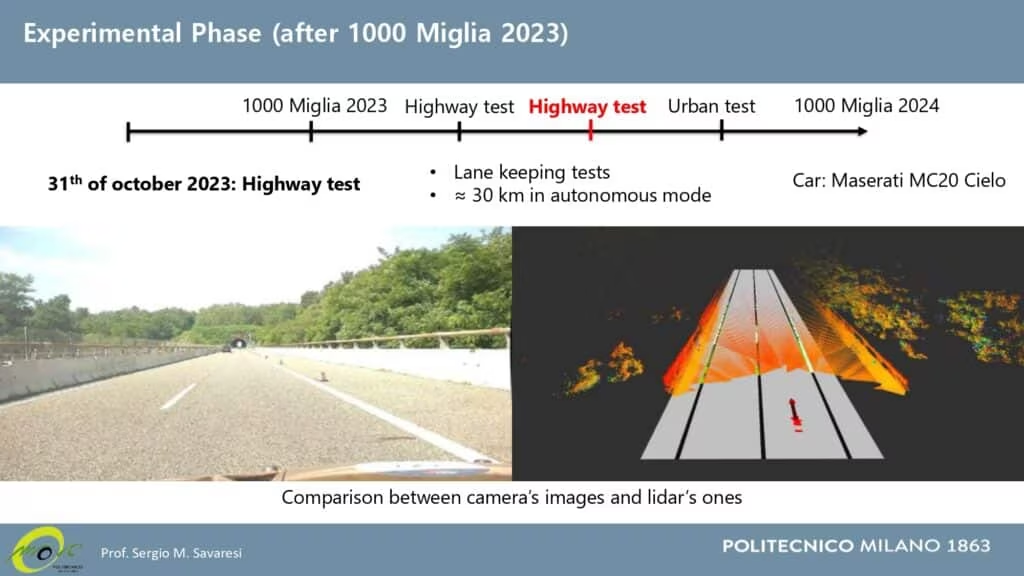
Altre prove effettuate: test autostradale nel quale sono stati eseguiti collaudi a velocità più elevate rispetto a quelle normalmente mantenute in contesti urbani ed extraurbani. Implementati nuovi metodi che hanno permesso al veicolo di conoscere la propria posizione nel mondo con l’ausilio di mappe supportate dalla tecnologia presente nell’equipaggiamento. In centri urbani aperti al traffico: Ferrara, Modena e Parma. In questo modo si è ottenuta la validazione degli algoritmi utilizzati durante la 1000 Miglia 2023, con particolare riferimento alle peculiarità di tali contesti.
Questo studio ha permesso di evidenziare i punti chiave del sistema a guida autonoma. Gli ottimi risultati ottenuti hanno spinto il team a proseguire nel lavoro. Il progetto ha dimostrato che la ricerca e l’innovazione possono condurre a grandi passi verso la realizzazione di una totale guida autonoma. Tale guida esprime solo uno dei tasselli che compongono il puzzle che rappresenterà un nuovo cambio di paradigma. Una nuova rivoluzione che ci spingerà tutti verso un nuovo modello di mobilità. Un modello di trasporto, molto più sostenibile. Un modo nuovo per vivere città e spazi aperti, con meno auto e più condivisione.