Dalla Berkeley University il primo cane guida robotico su quattro zampe

Cane guida robotico quattro zampe - freepik prostooleh
Sebbene esistano già svariati esempi di cani guida robotici, la maggior parte di essi utilizza sistemi di locomozione basati su ruote e presenta dei bastoni rigidi come guinzagli. Queste caratteristiche non rendono tali sistemi di guida molto versatili, soprattutto in prossimità di spazi stretti e affollati. Il cane guida robotico messo a punto dai ricercatori della Berkeley University, invece, presenta le sembianze di un vero e proprio cane perché usa quattro zampe per spostarsi.
L’idea del “modello ibrido” per il cane guida robotico
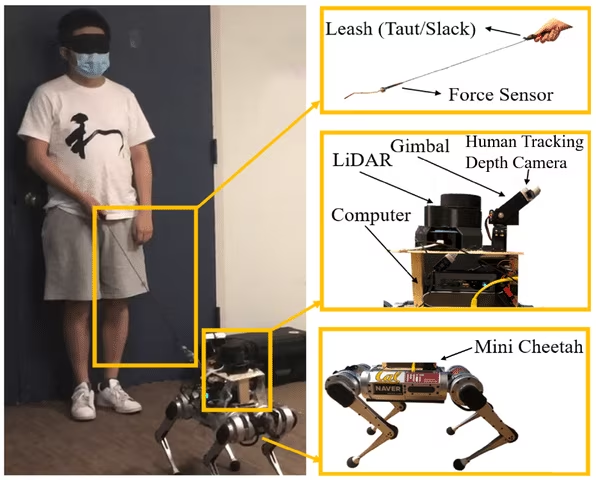
Alla base del robot realizzato dai ricercatori dell’Hybrid Robotics Group c’è il concetto del modello ibrido. Il sistema nel suo complesso è costituito, infatti, da tre parti fondamentali: l’umano che deve essere guidato, il cane-robot e il guinzaglio. L’idea dei ricercatori era proprio quella di voler replicare in maniera artificiale l’interazione che si crea tra l’uomo e il cane quando questo tira il guinzaglio. Grazie ad un sensore di forza posizionato alla base del guinzaglio, gli scienziati hanno sviluppato un sistema di guida nel quale l’interazione tra il robot e l’essere umano è basata sulla tensione esercitata dal cane robotico sul guinzaglio stesso.

Per esempio, quando il sistema robot-guinzaglio-umano entra in uno spazio stretto, come un angolo di un corridoio, il robot può prima allentare il guinzaglio. Questo permette al robot di riposizionarsi e riorientarsi senza influenzare direttamente la posizione dell’essere umano. Una volta riposizionato, il robot può tirare nuovamente il guinzaglio per guidare l’umano correttamente attraverso la regione stretta.
Zhongyu Li, ricercatore del team.
Il funzionamento del cane guida robotico
Una delle caratteristiche fondamentali dei robot mobili è quella di essere in grado di mappare tutto l’ambiente circostante. Il quadrupede dell’Hybrid Robotics Group è dotato di sensori che gli permettono di osservare e mappare tutto lo spazio in cui si trova. Grazie ad un sensore LIDAR 2D e ad una camera RGB, esso è in grado di costruire una vera e propria mappa (individuando gli ostacoli presenti) e di stimare sia la propria posizione che quella della persona all’interno di essa. La camera, infatti, è montata su un piedistallo in grado di ruotare ed inclinarsi proprio come fa una testa.
Una volta stimate la propria posizione e quella dell’umano all’interno della mappa, il robot definisce una traiettoria da seguire (evitando gli ostacoli) cercando di minimizzare il tempo impiegato per raggiungere il punto di arrivo, la tensione con cui viene tirato il guinzaglio e la velocità con cui il quadrupede si sposta in avanti.
Il modello robot-guinzaglio-umano
Per descrivere l’intero sistema di guida, i ricercatori del team hanno definito un modello dinamico in grado di rappresentare il sistema robot-guinzaglio-umano sia nella condizione di guinzaglio teso, che allentato. Nel primo caso sono partiti dall’ipotesi che l’individuo non vedente sia guidato dal cane muovendosi nella stessa direzione della forza applicata dal robot sul guinzaglio. In questo modo, la persona risente della forza soltanto quando il guinzaglio è teso. Quando il guinzaglio è allentato, invece, è solo il robot ad essere libero di muoversi nello spazio. In entrambe le situazioni, le equazioni del modello dinamico si sono ottenute semplicemente da relazioni di tipo geometrico.
I risultati degli esperimenti
Dagli esperimenti condotti nei laboratori della Berkeley University sono emersi dei risultati davvero promettenti. Il cane guida robotico, testato all’interno di un percorso stretto e pieno di ostacoli, è riuscito a guidare correttamente e in sicurezza una persona bendata in tre diverse circostanze. Inoltre, i ricercatori hanno notato un comportamento estremamente cauto da parte del quadrupede: in prossimità del secondo passaggio stretto, come si può vedere anche nel video, il robot tende a permanere nella configurazione con il guinzaglio allentato, fino a quando non si rende conto di poter far proseguire il suo padrone attraverso il passaggio stretto senza problemi.
Il team sostiene che eventuali sviluppi futuri del cane guida robotico possono prevedere la modellazione di comportamenti umani più complessi. Alcuni di essi, ad esempio, prevedono la trazione del guinzaglio anche da parte dell’uomo, rendendo il sistema ancora più realistico. Gli incoraggianti risultati degli esperimenti aprono la strada ad una nuova era della robotica di servizio, in cui i robot saranno utilizzati sempre più per scopi di assistenza a persone fragili o con disabilità.
Articolo a cura di Augusto Bozza